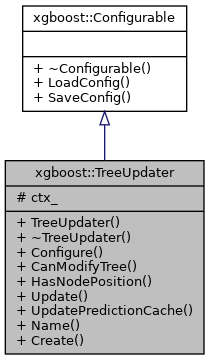
interface of tree update module, that performs update of a tree.
More...
#include <tree_updater.h>
interface of tree update module, that performs update of a tree.
◆ TreeUpdater()
| xgboost::TreeUpdater::TreeUpdater |
( |
const Context * |
ctx | ) |
|
|
inlineexplicit |
◆ ~TreeUpdater()
| xgboost::TreeUpdater::~TreeUpdater |
( |
| ) |
|
|
overridedefault |
◆ CanModifyTree()
| virtual bool xgboost::TreeUpdater::CanModifyTree |
( |
| ) |
const |
|
inlinevirtual |
Whether this updater can be used for updating existing trees.
Some updaters are used for building new trees (like hist), while some others are used for modifying existing trees (like prune). Return true if it can modify existing trees.
◆ Configure()
| virtual void xgboost::TreeUpdater::Configure |
( |
const Args & |
args | ) |
|
|
pure virtual |
Initialize the updater with given arguments.
- Parameters
-
| args | arguments to the objective function. |
◆ Create()
Create a tree updater given name.
- Parameters
-
| name | Name of the tree updater. |
| ctx | A global runtime parameter |
| task | Infomation about the objective. |
◆ HasNodePosition()
| virtual bool xgboost::TreeUpdater::HasNodePosition |
( |
| ) |
const |
|
inlinevirtual |
Whether the out_position in Update is valid. This determines whether adaptive tree can be used.
◆ Name()
| virtual char const* xgboost::TreeUpdater::Name |
( |
| ) |
const |
|
pure virtual |
◆ Update()
perform update to the tree models
- Parameters
-
| param | Hyper-parameter for constructing trees. |
| gpair | The gradient pair statistics of the data |
| p_fmat | The data matrix passed to the updater. |
| out_position | The leaf index for each row. The index is negated if that row is removed during sampling. So the 3th node is ~3. |
| out_trees | references the trees to be updated, updater will change the content of trees |
- Note
- All the trees in the vector are updated, with the same statistics, but maybe different random seeds, usually one tree is passed in at a time, there can be multiple trees when we train a random forest style model.
◆ UpdatePredictionCache()
Determines whether updater has enough knowledge about a given dataset to quickly update prediction cache for the training data and performs the update if possible.
- Parameters
-
| p_fmat | data matrix |
| out_preds | prediction cache to be updated |
- Returns
- boolean indicating whether updater has capability to update the prediction cache. If true, the prediction cache will have been updated by the time this function returns.
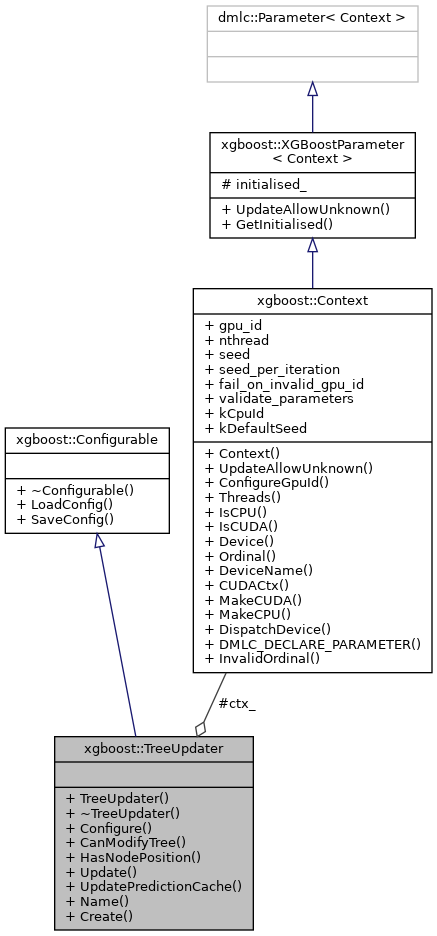
◆ ctx_
| Context const* xgboost::TreeUpdater::ctx_ = nullptr |
|
protected |
The documentation for this class was generated from the following file:
- /home/docs/checkouts/readthedocs.org/user_builds/xgboost/checkouts/stable/include/xgboost/tree_updater.h
 Public Member Functions inherited from xgboost::Configurable
Public Member Functions inherited from xgboost::Configurable